Luukide lahti ja kinnikerimist teeb akutrell, mille padrunisse on kinnitatud ühemeetrine keermelatt. Keermalati teine ots on kinnitatud laagriga. Latti mööda jookseb mutriga klots, millele kinnituvad luuke tõmbavad trossid. Trossid jooksevad üle blokkide, et sobivas suunas luuki sikutada.
Rulluisulaager on üsna lihtsalt leitav jubin, tema avasse mahub M8 keermelatt. Meeterkeermega lati halb külg on see, et keermed on üsna tihedalt ja katse näitas, et selle ühemeetrise lati peal mutri ühest otsast teise kerimiseks kulub mu trellil tervelt poolteist minutit. Plussiks aga on muidugi kättesaadavus. Algul mõtlesin kasutada pikemat jätkmutrit, aga kuna tavalise suurusega mutrit oli lihtsam klotsi külge kinnitada (kui keevitamisvõimalust ei ole), siis võtsin ikkagi tavalise. Kogu selle keermelati kupatuse plussiks on aga väga väikese jõumomendi vajadus. Kui blokid ja tross vastavad valida, siis saaks ka palju-palju raskemaid asju nõnda liigutada. Ning tagasivajumine on samal põhjusel välistatud.
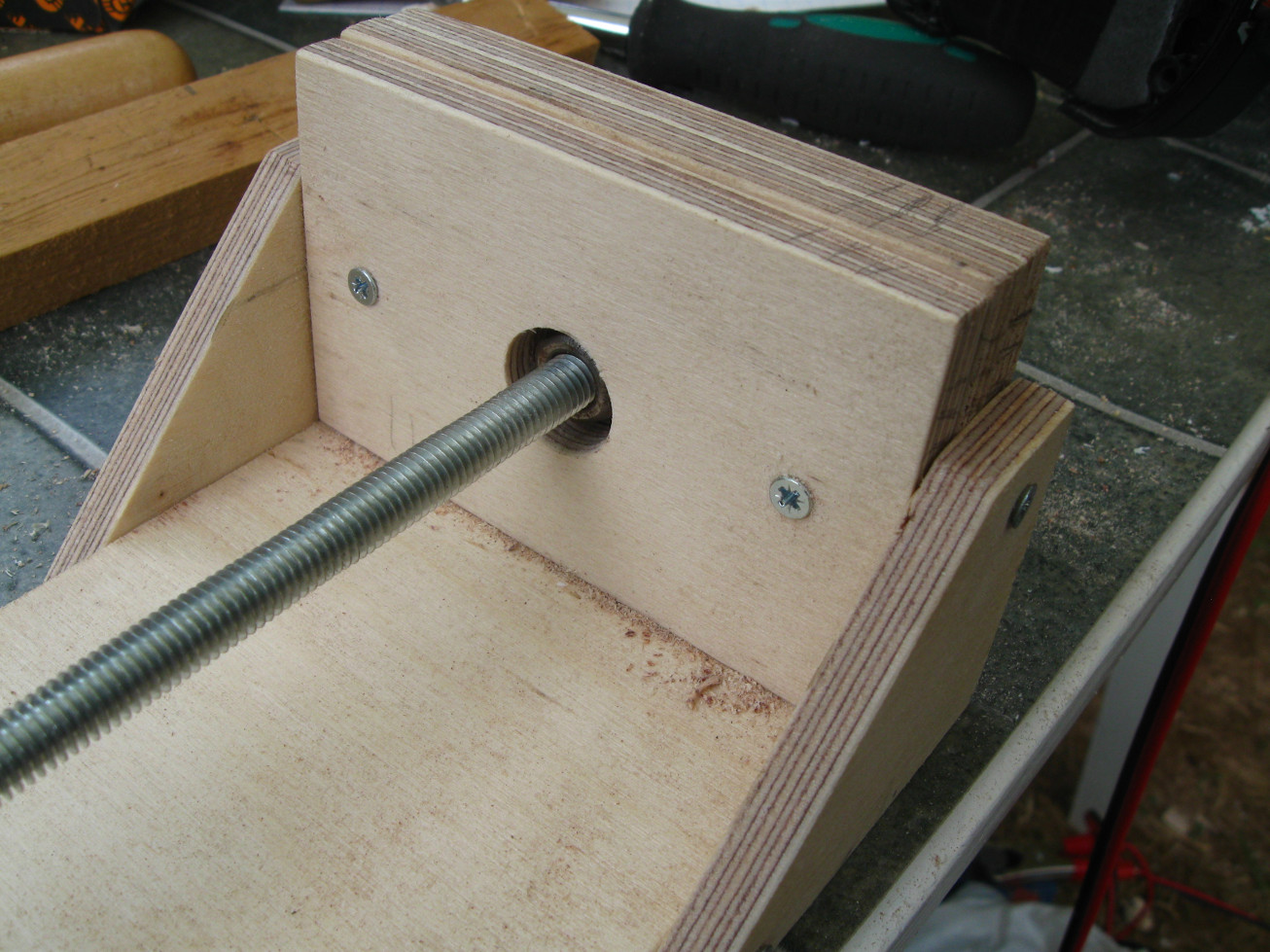
Latil jookseval klotsil peab olema veel mingi "rööbas" või juhtlatt või asi, mis hoiab teda koos keermelatiga ringi keerlemast, aga võimaldab piki keermelatti liikuda. Pika mõtlemise peale leidsin, et kõige lihsam on ehitada "vanker" mis sõidab mööda keermelatiga paralleelset seina. Kogu konstruktsiooni kooshoidmiseks oli mingit korpust vaja ja mul leidus paksu vineeri, millest tagasein teha. Ühtpidi keeramisel on üks ratas kõvemini maas, teistpidi keeramisel teine, aga üldiselt püsib asi seal seina lähedal. "Rataste" kasutamisega sain hõõrdumise väikeseks. Ideaalne oleks jäik tugilatt, mis istuks peaaegu lõtkuta igast küljest liikuva klotsi sisse, aga sellise hankimiseks mul ei tulnud ühtki head ideed. Minu tehtud kahest või õigemini korraga ühest punktist keerlemist takistava süsteemi häda on, et keermelatt ei ole ideaalselt jäik ja hakkab liikumisel võnkuma, kaasa võngub ka klots ning hüpleb oma tugiseina vastas. Müra on märgatav.
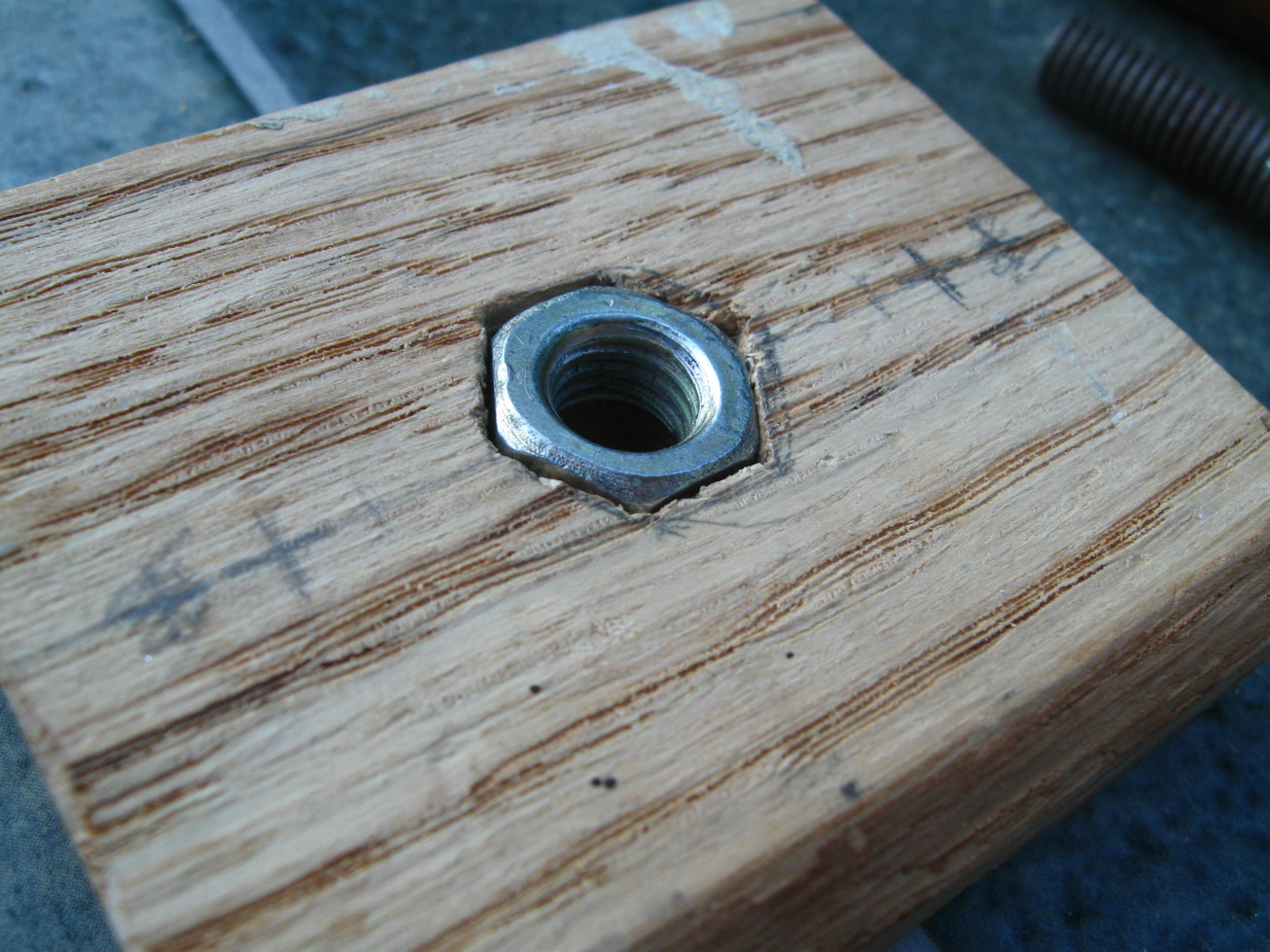
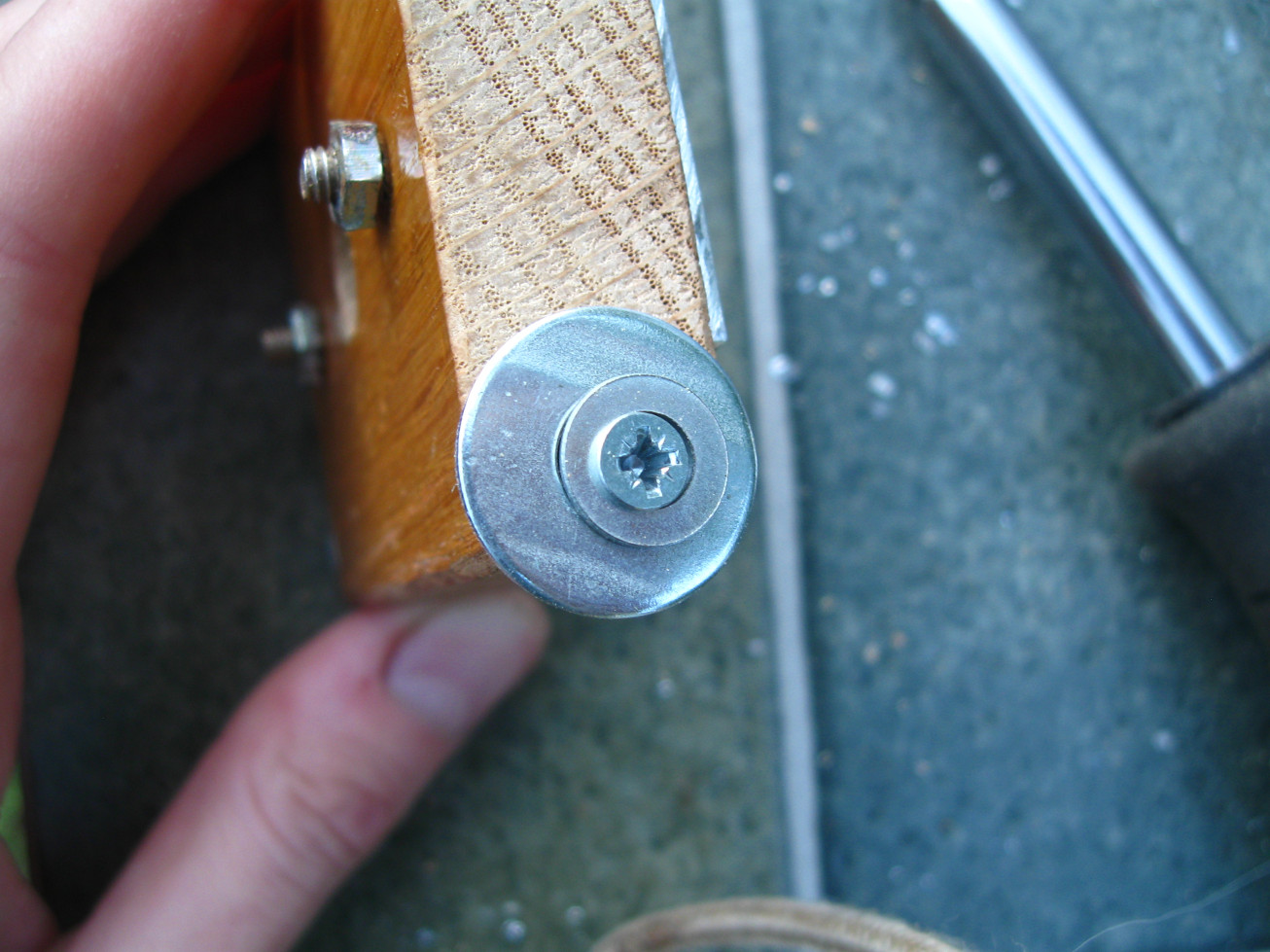
Klotsi jaoks kasutasin tammepuidu jupikest. Selgitasin välja selle mõõdu, kui kaugel kinnituspinnast saab olema akutrell-doonori pöörlemistelg ja märkisin klotsil sellest paar millimeetrit väiksema kauguse servast. Puurisin keermelatist jämedama augu. Võtsin poldi, millel pea sama suur, kui klotsi sisse mineval mutril, mähkisin natuke teipi ümber, et ta augu keskpaika satuks ja märkisin poldipea järgi mutri nurgad klotsile. Märkisin maalriteibiga mutri paksuse peenikesel puuril ja puurisin klotsi sisse augud, mis mutri nurkasid näitaks. Mutripesa peitliga väljalöömisel oli mul üks selle tööriistaga osavam inimene abiks, aga arvatavasti ka see ei ole eriti keeruline. Mutter mahtus üsna täpselt pesasse. Pikemaks kasutuseks oleks ikkagi hea liimi ka vahele panna, mida veel ei teinud.
Nüüd ühelt poolt takistab mutri väljakukkumist vähemalt sentimeetripaksune tammepuit. Teiselt poolt panin vastu metallitüki ja kinnitasin peenemate poltidega. Oleks saanud ka kruvidega, aga kaht polti saan lisaks kasutada trossiotste kinnitamiseks ja need kannatavat mitmekordset lahtivõtmist, kui vaja.
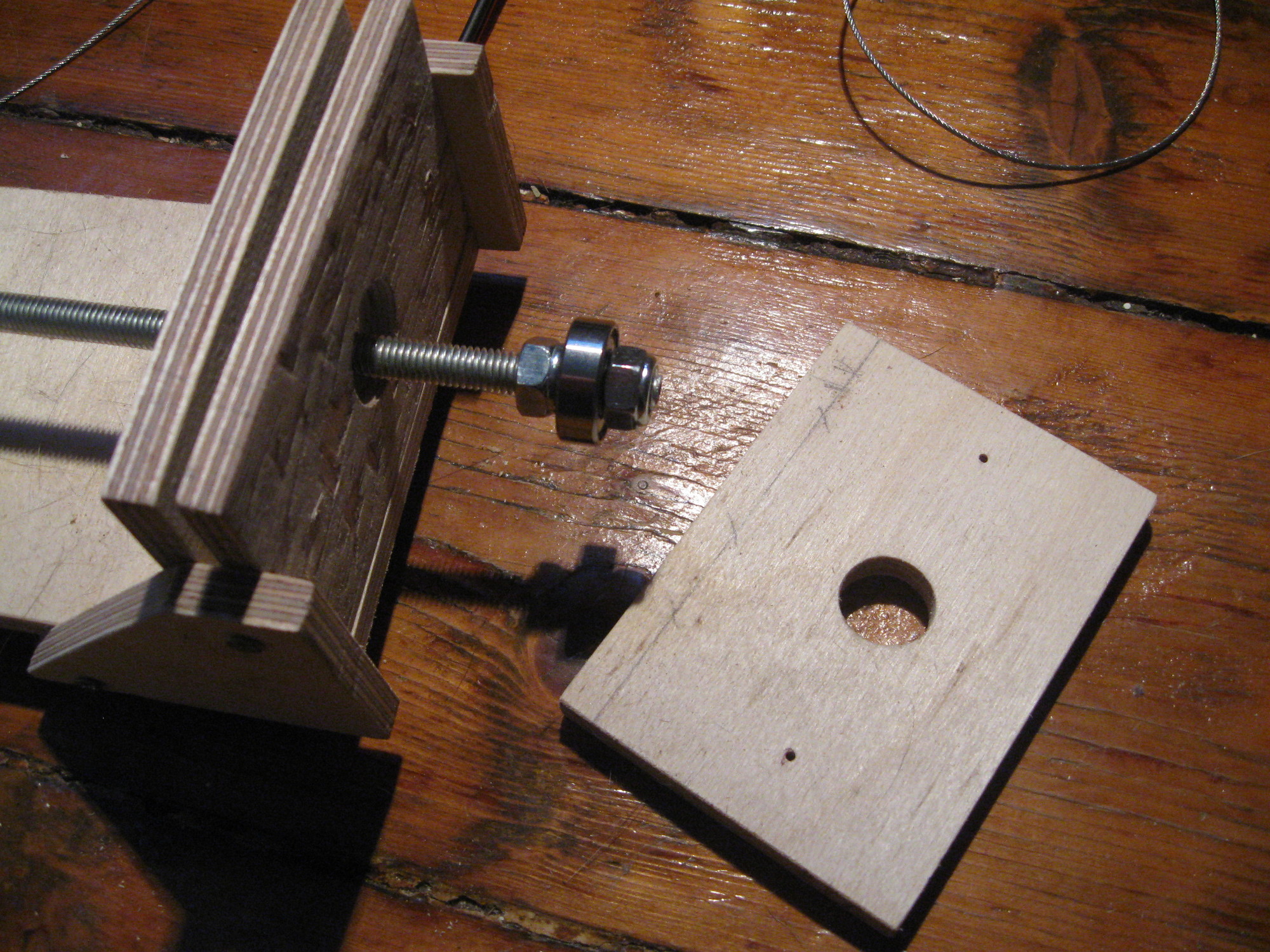
"Rataste" jaoks otsisin ühed suuremad seibid. Et metall-metalliga kontakt on minu intuitsiooni järgi väiksema hõõrdega kui metall-puiduga, siis lisasin väiksemad seibid - välimine on vajalik ka seetõttu, et kruvipea oli suure seibi augu jaoks liiga väike, sisemine on peamiselt hõõrdumise vähendamiseks. Päris telje ümber see asi pöörle, kuna seibi auk on omajagu suur, aga meenutab siiski veeremist liigub üsna kergelt. Kuna rattaid hoidvad kruvid kinnituvad väga klotsi ääre läehdale, siis siin on tammepuu tublisti kasuks võrreldes tavaliselt kättesaadava pehme broilerpuiduga. Kruve jõuga kinni keerata ei saa, selle kompenseerimiseks panin kruviauku liimi. Jääb loota, et seibiservad vineeri, mida mööda nad veerevad, väga ära ei räsi. Kui see peaks juhtuma, siis hangin mingid laiemad rattad.
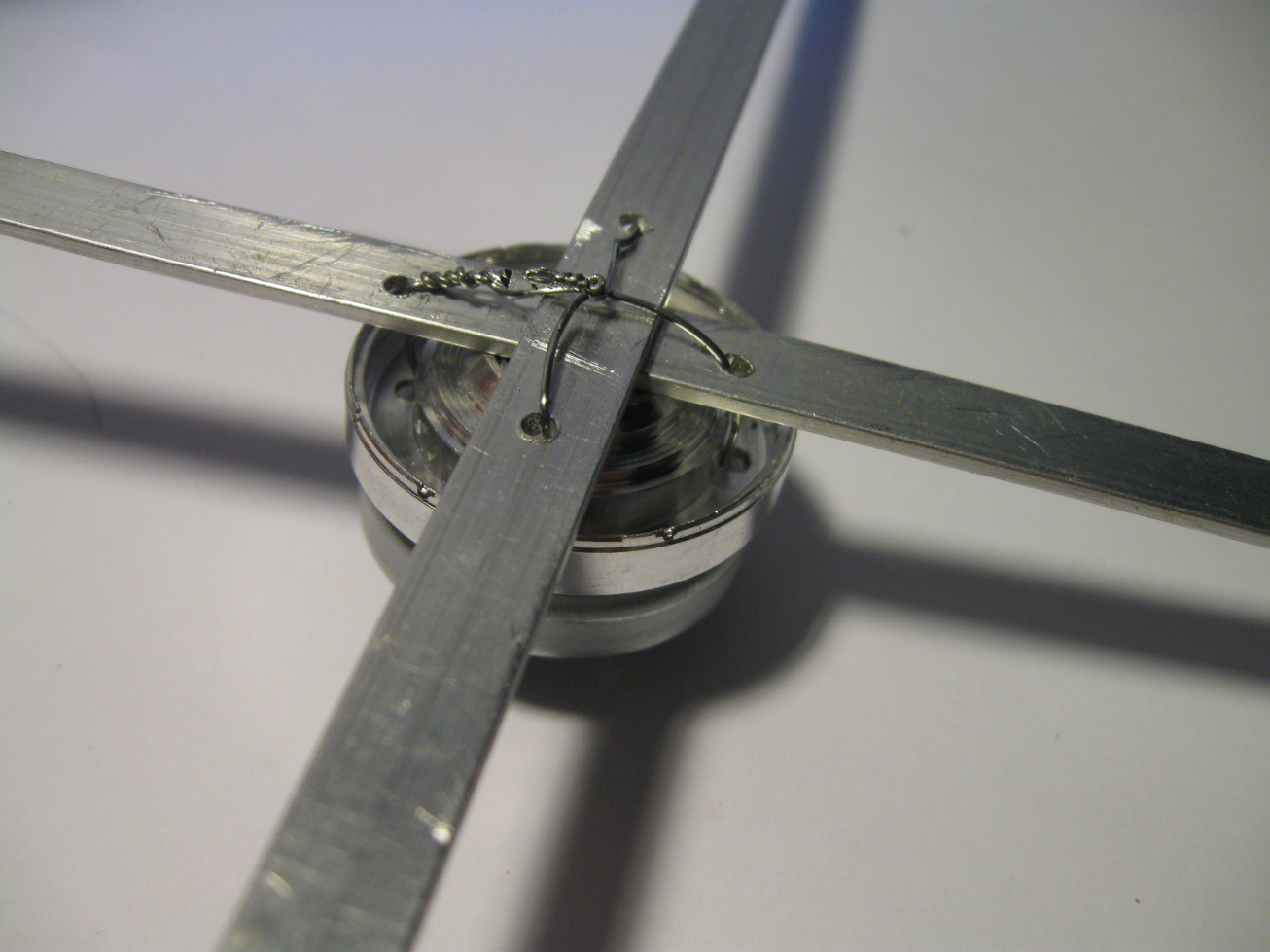
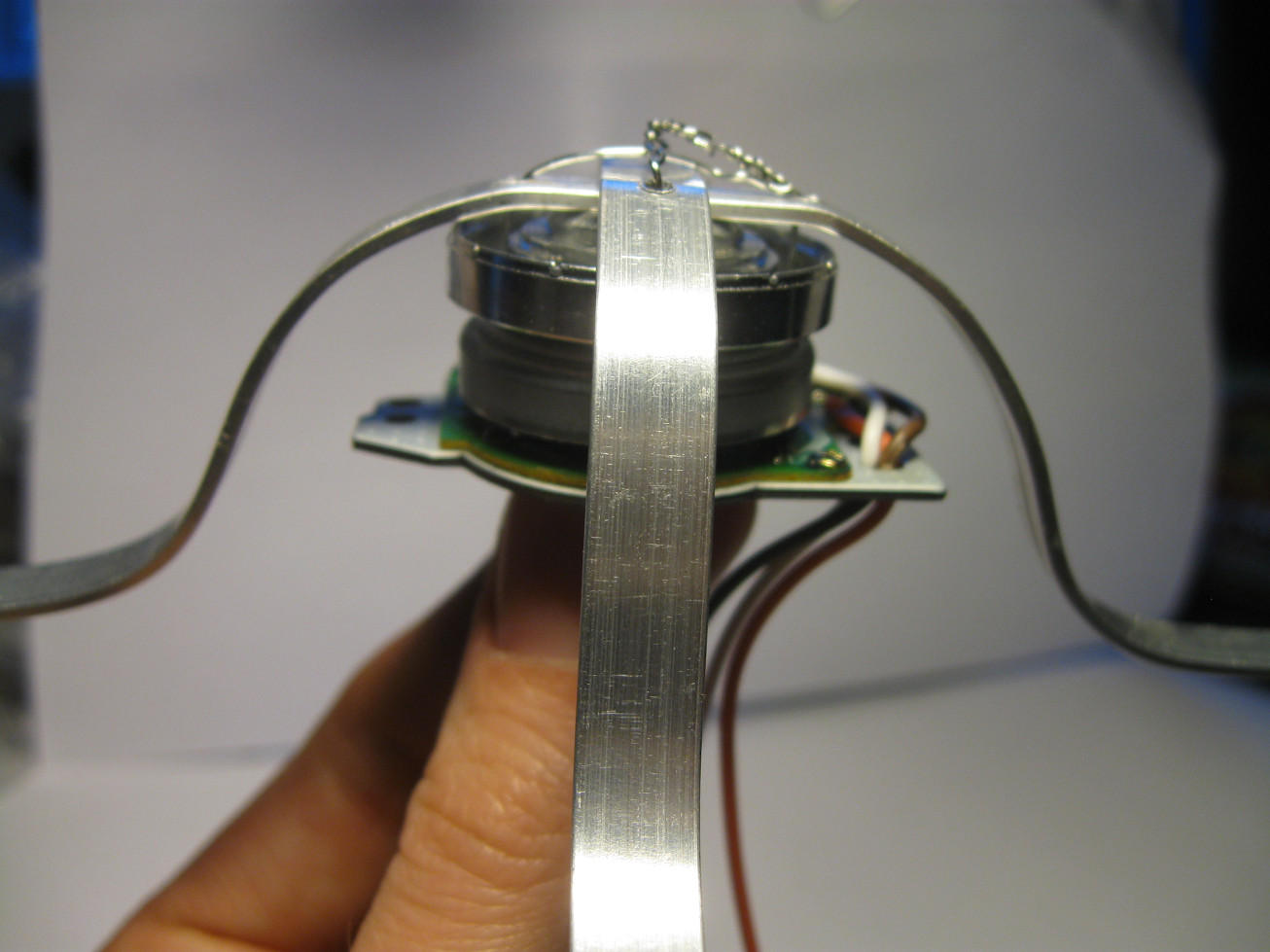
Et keermelatt kindlamalt trellipadrunis püsiks, viilisin talle otsas kolm kanti sisse, iga padrunimoka jaoks. Laager kinnitub keermelati teise otsa kahe nylock ehk lukustuva mutriga. Laagri korpuse küljes hoidmiseks tegin augusae abil vineerist kolm kihti - kaks sellise auguga, mis laagri välisserva ära katab, aga mutter mahub sees pöörlema ja ühe sellise kuhu laager ise täpselt sisse istub. Vineer oli 8mm paks, aga laager on 7mm, seetõttu võtsin peitli abiga keskmisel tükil ühe spoonikihi maha. Nede tükkide lõikamisel tuleb ka tähele panna, et pöörlemistelg jääks seinast sama kaugele, kui trelli juures. Keskmise kihi kinnitasin tuginurkadega tagaseina külge, pealmine ja alumine on eemaldatavad kahe kruvi väljakeeramisega - see koht võib hiljem sättimist vajada.
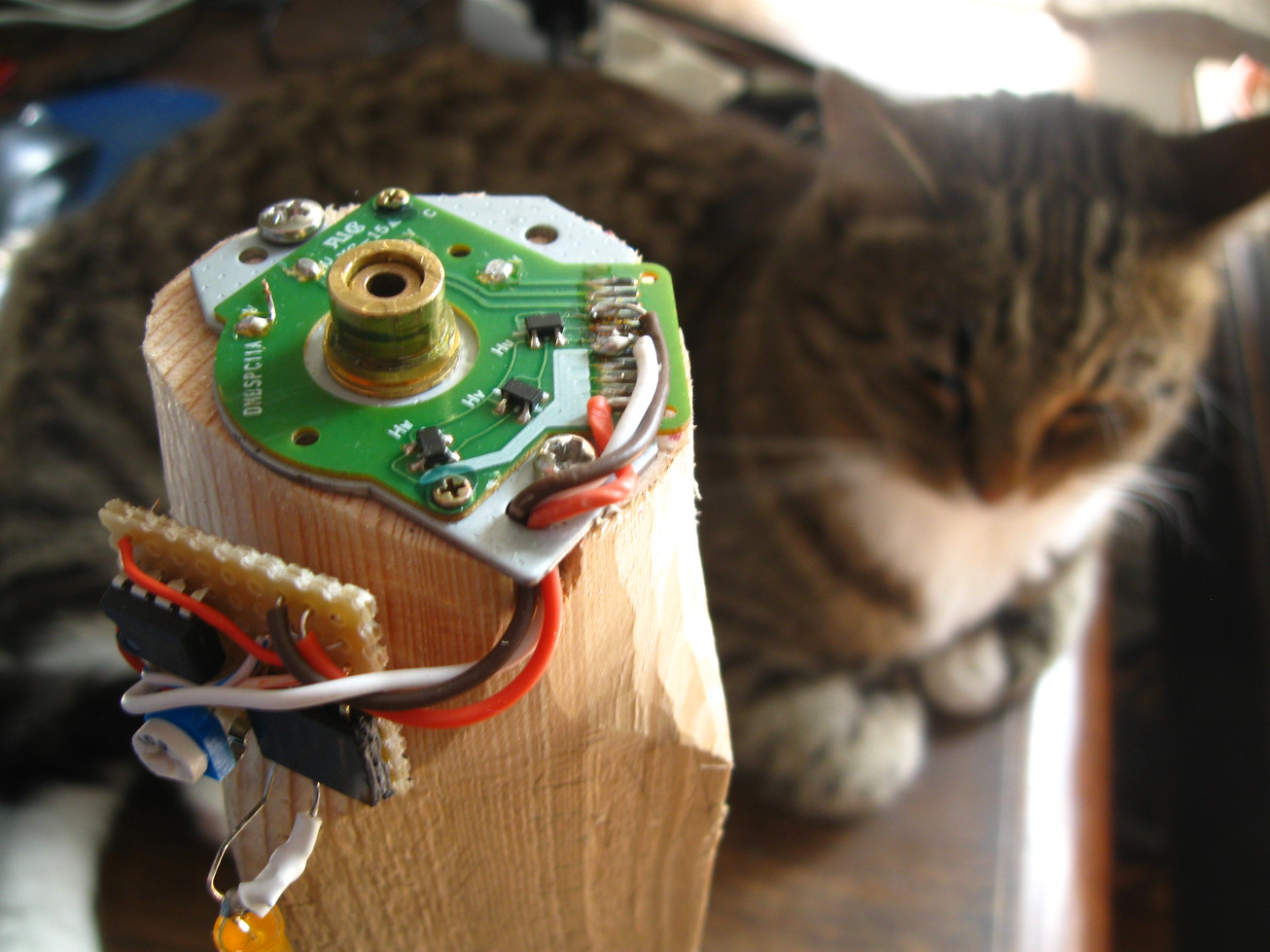
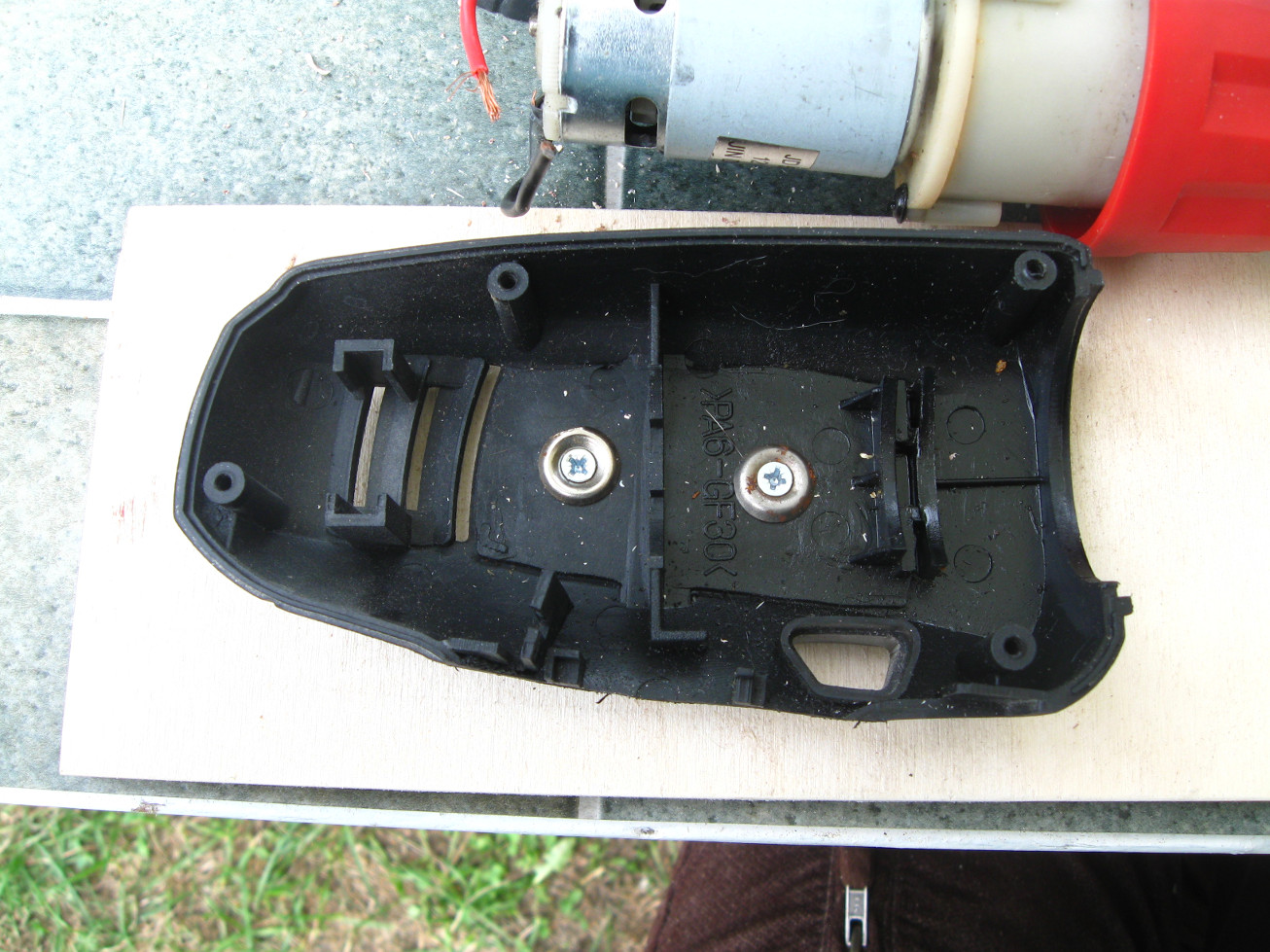
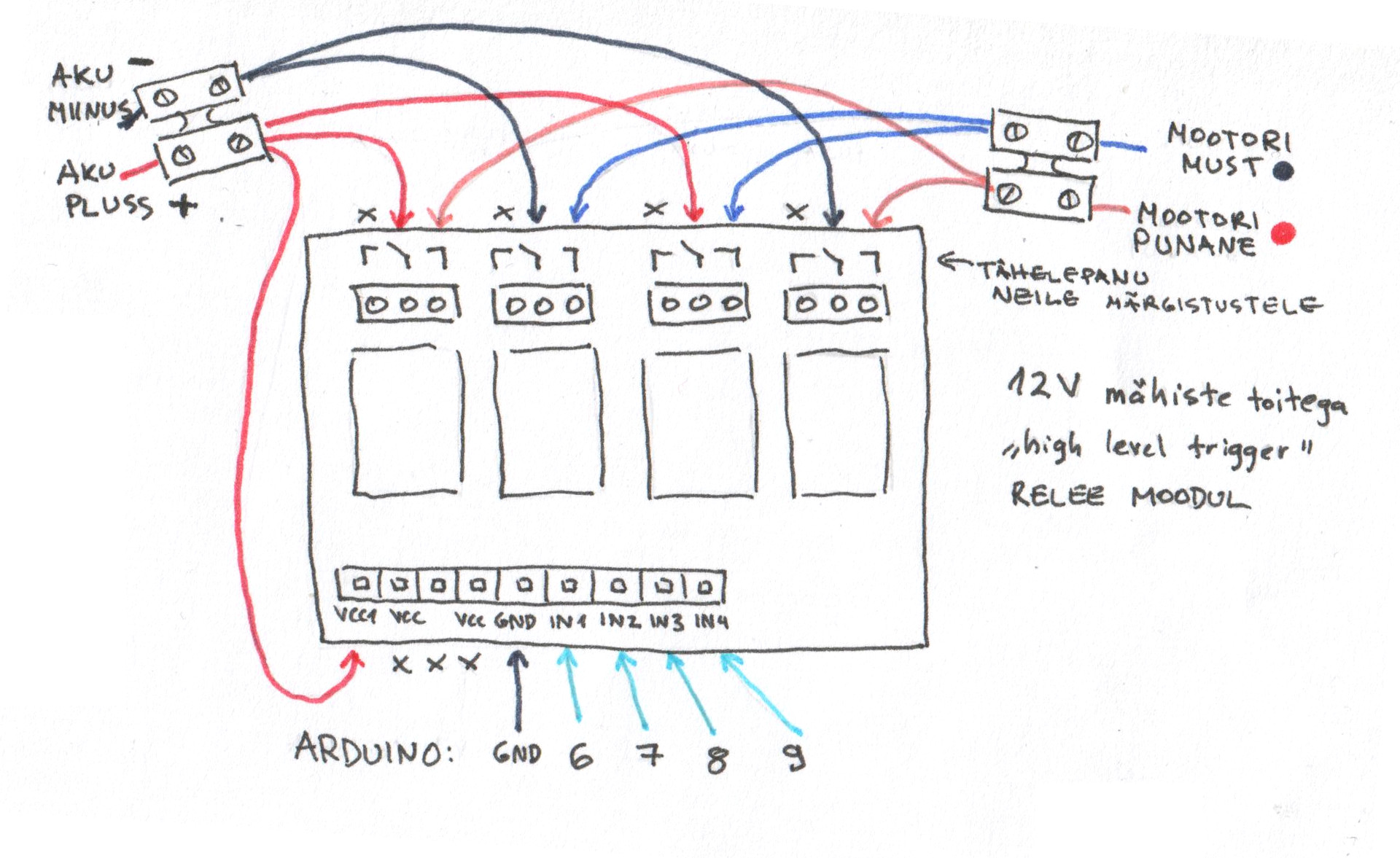
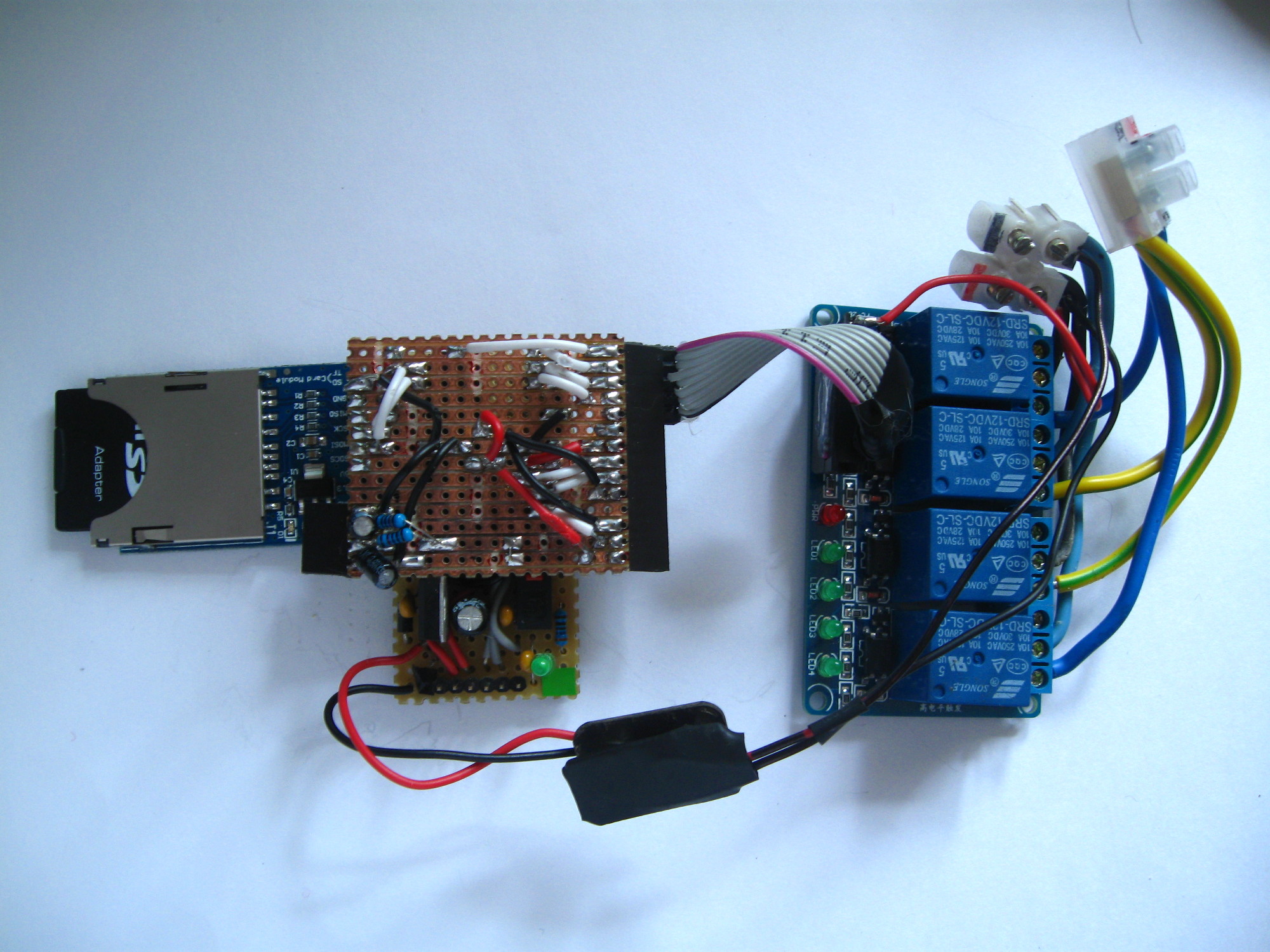
Trellist viskasin välja (varuosade kasti) lüliti ja akuklemmide osa, sest releedest tulevad juhtmed hakkavad otse mootorisse ühenduma. Käepideme saagisin maha (läks ka varusade kasti - kes teab, mida ma järgmiseks ehitama hakkan...). Kinnitasin plastikkorpuse kruvide ja toetavate seibidega seina külge. Seejuures tuli ühele kruvile panna ka plastiku ja seina vahele seib, et liikuvad osad ilusti sirgel joonel oleks. Keerasin korpuse ta kruvidega kinni, aga kindlasti lisan väljapoole veel ühe tugeva kinnituse, sest ainult see plastik kaua sellist vibratsiooni ei talu.
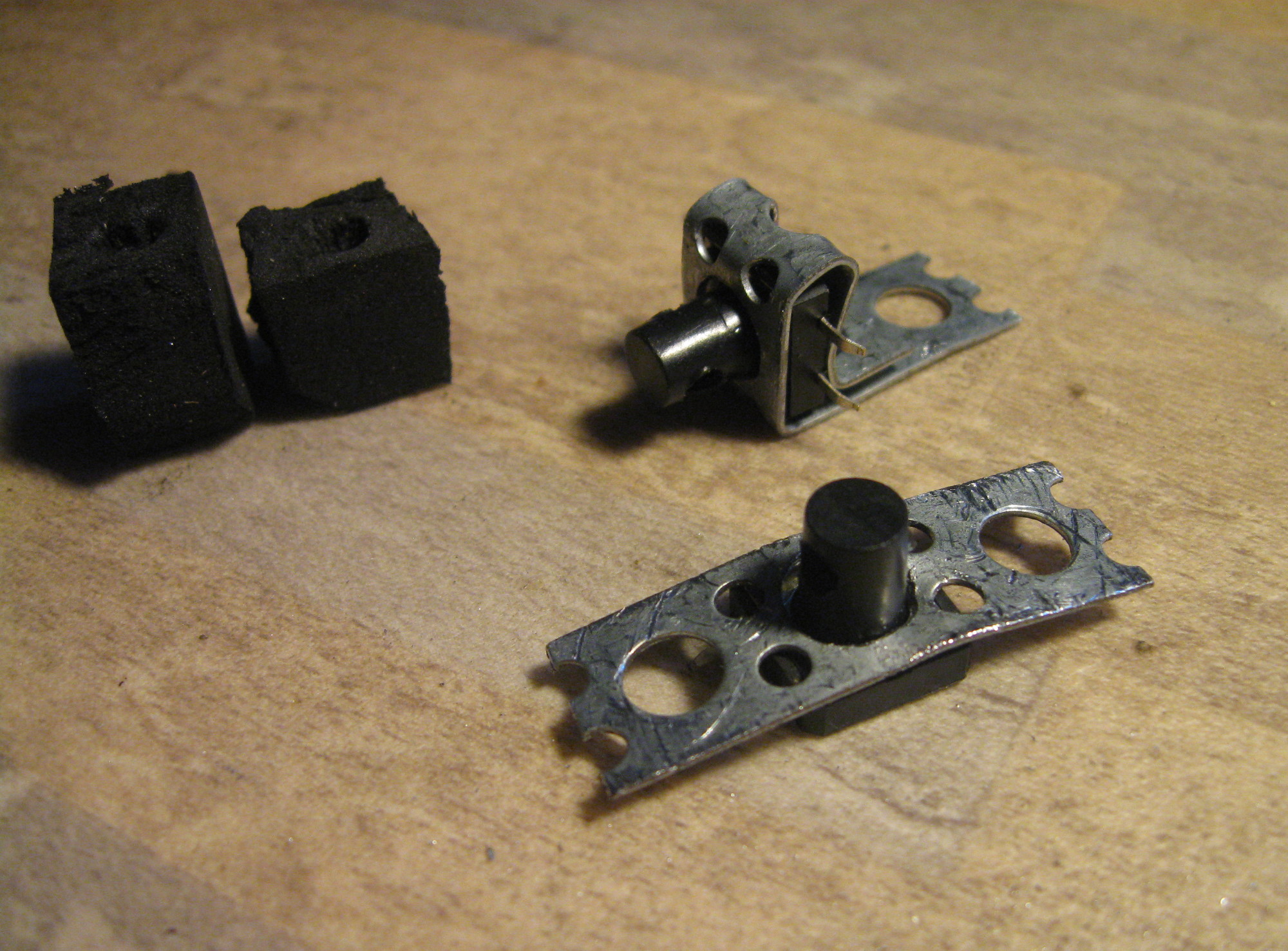
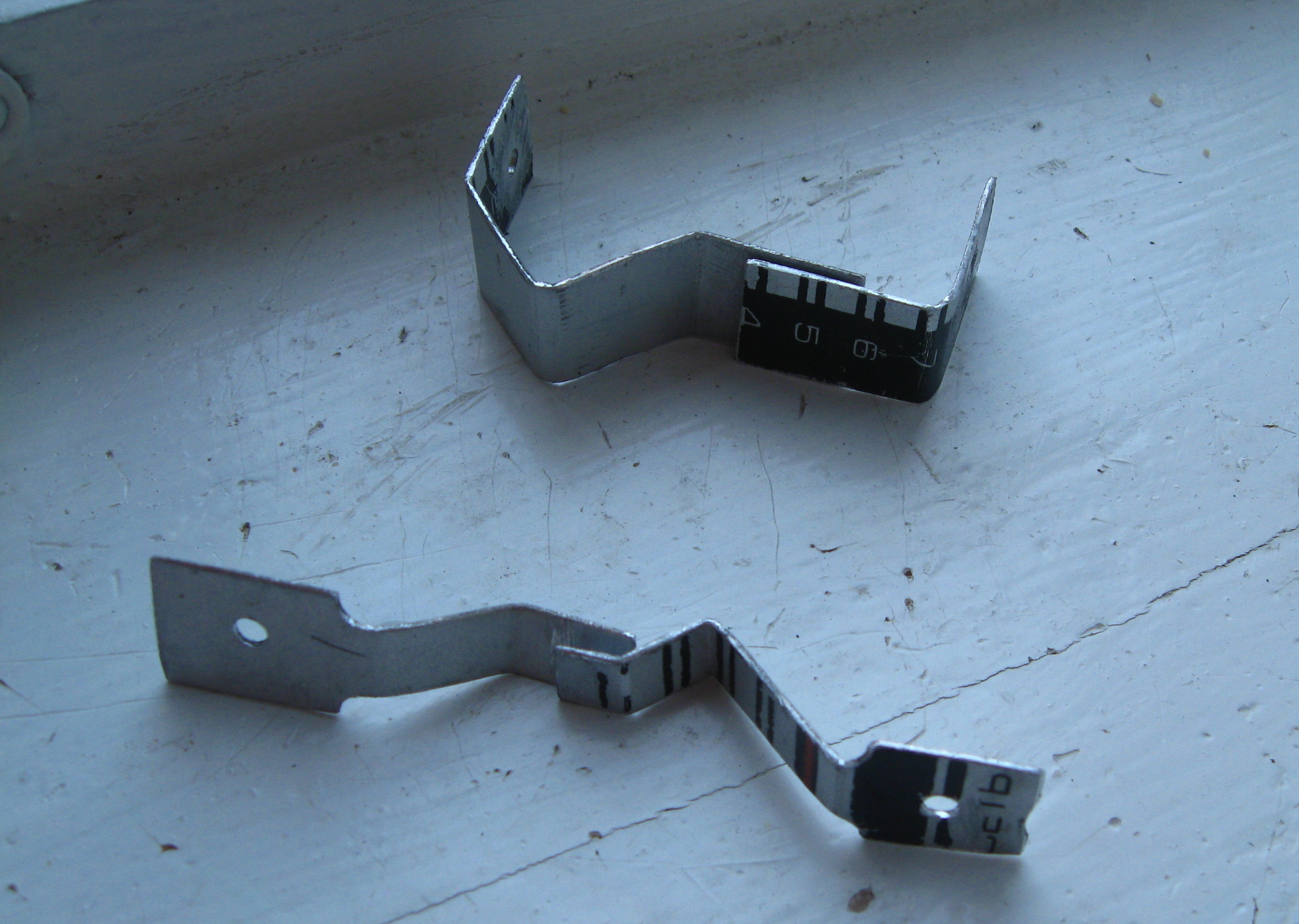
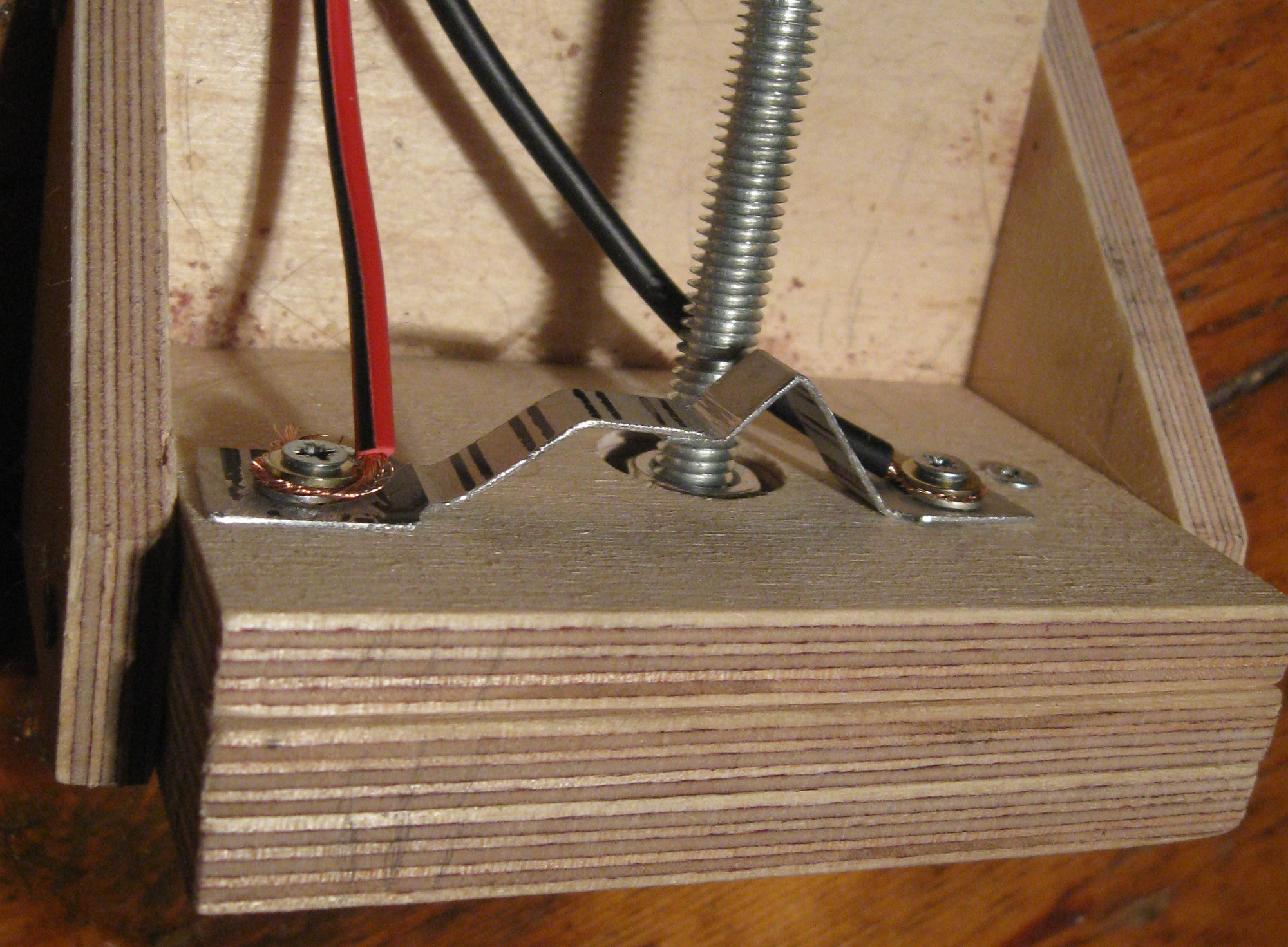
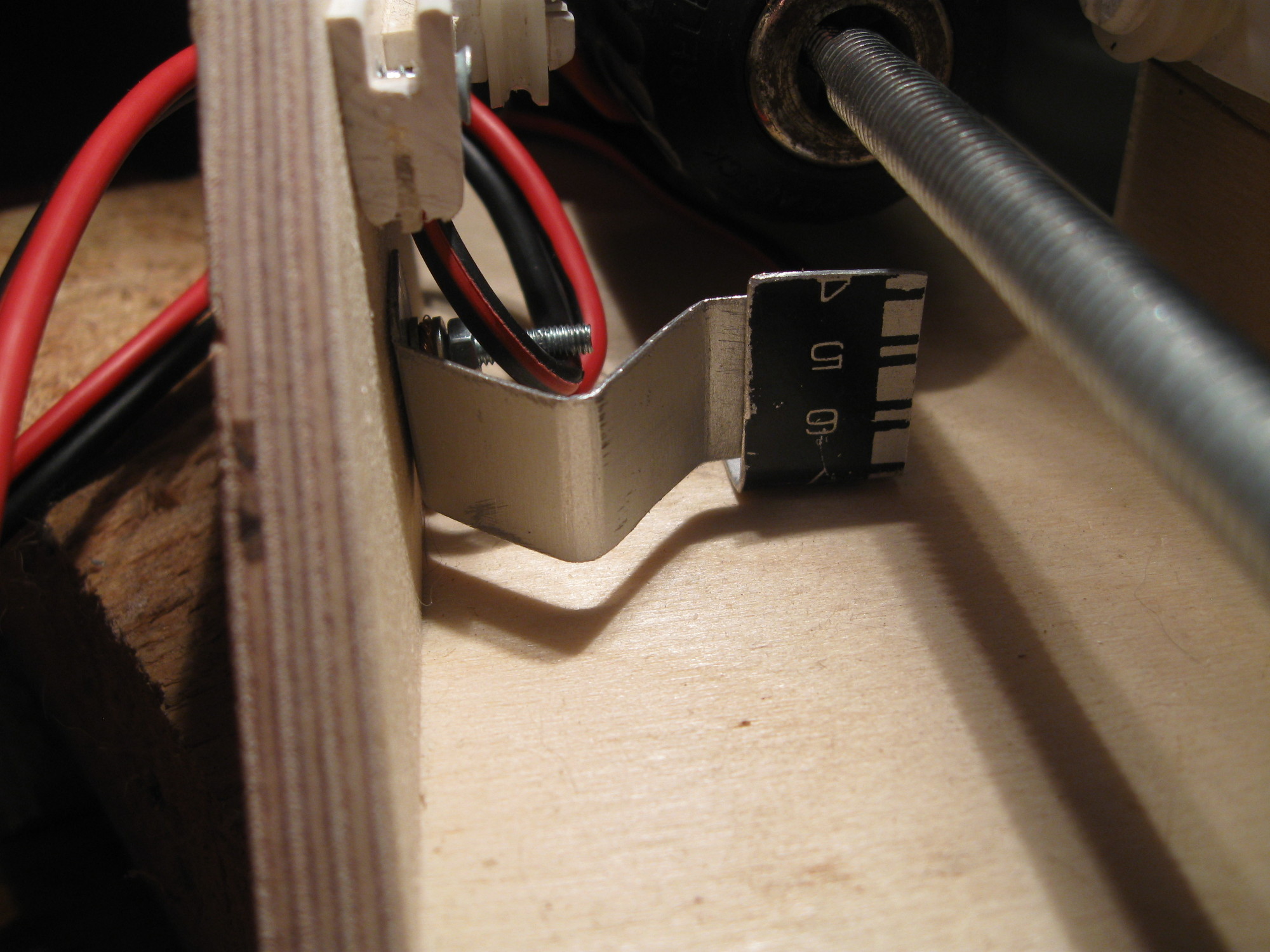
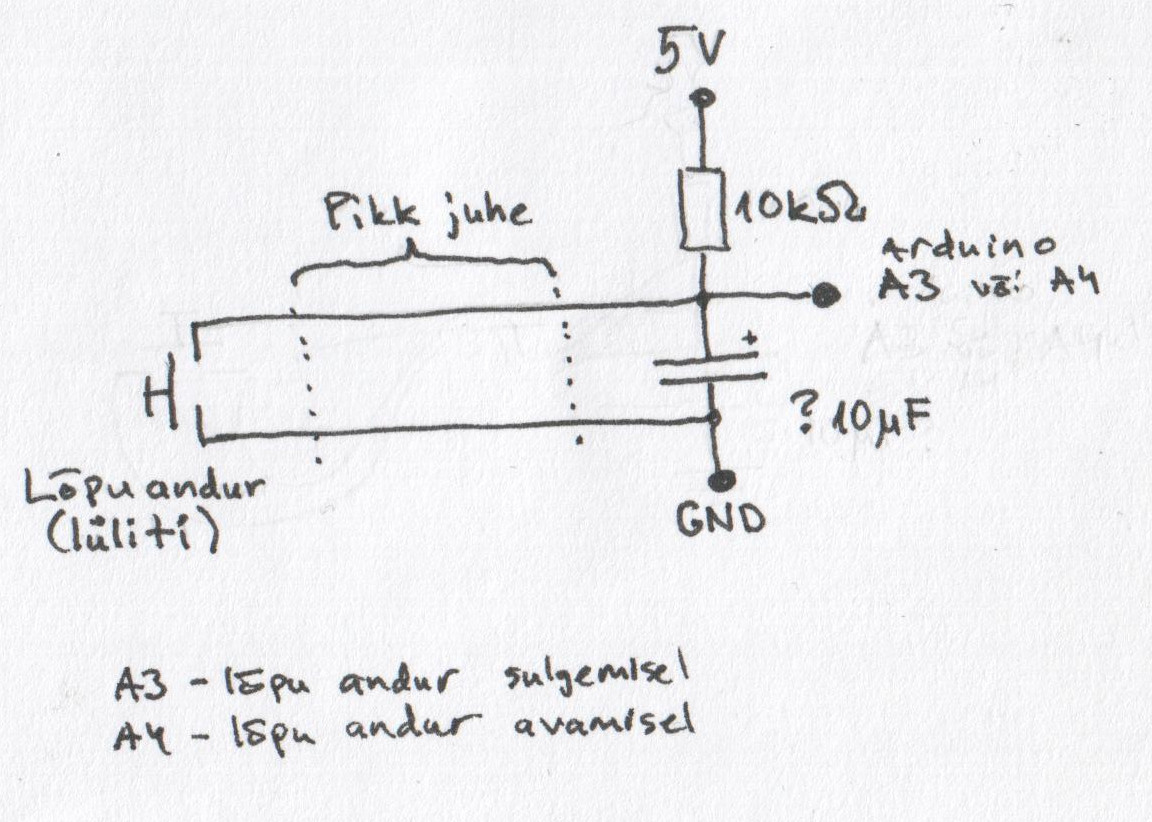
Mehaanika ja elektroonika piirimailt käivad selle konstruktsiooni küljes ka piirangulülitid. Üleval kinnikerimise oma ja all lahtikerimise oma. Tegin neid lausa topelt - üks paar lüliteid on ühendatud mikrokontrolleriga ja nende lülitumisel peab kontroller kerimise peatama. Kuna need ei ole mul kõige töökindlamal viisil tehtud - kui juhe läbi lõigata, siis kontroller arvaks lihtsalt, et nuppu ei vajutata ja kogu lugu - siis tegin tagavarasüsteemi ka. Nimelt vedasin trelli ühe juhtme läbi nii klotsi ülemise kui alumise asendi juurest ja tegin sinna plekiribadest selllised kontruktsioonid, et kui klots oma tavaliselt lõpu andurist edasi sõidab, siis lükkab ühe plekiriba paigast ja katkestab sellega trellis voolu. Niimoodi ei saa trell kogu mu puusepatööd seal ära lõhkuda. Kontrolleriga ühendatud lõpu anduriks kasutasin suuremat sorti nupp-lüliteid, millele lisasin peale vetruvat materjali (see oli motoriiete kahtlase kvaliteediga kaitse, sarnaneb matkamadratsi materjalile). Vetruvust on vaja, sest peatumine ei toimu hetkega ja tugevalt surudes ilmselt läheks lüliti katki. Kui mul neid nuppe sahtlis poleks olnud, siis oleksin ostnud hoovaga lülitid, millele ei peaks midagi omaltpoolt juurde ehitama. Kui hädapeatuse lülitid plekitüki asemel osta lülitid, siis need peavad olema normaalasendis sisselülitatud tüüpi ja kannatama suuremat voolu, 5 amprit võiks ikka ära olla. Minu eksperimendi järgi akutrell võtab kerge koormuse ajal ühtlaselt töötades 3A, aga startimise hetkel üle 10A (vaata videot http://libahunt.ee/battery-drill-revival).